There are several techniques that can be used to operate a scanning probe microscope. The choice of which method to use will depend on the situation at hand and the purpose.
Scanning probe microscopes are able to form images by raster scanning the probe of the microscope over the surface of the specimen that is being viewed. Values are recorded at certain points in the raster scan, according to the time of scanning probe microscope and technique that is being implemented. These values are then collated to create a heat map that is used to produce the final image.
A scanning probe microscope may be set to “contact mode” or “tapping mode.” Contact mode maintains a constant force between the cantilever tip of the microscope and the sample surface, which allows fast production of the image. Tapping made involves oscillation of the cantilever, so the tip intermittently comes into contact with the sample surface, which is more useful for softer samples.
Credit to illustrator Kristian Molhave and acknowleddgment to the Opensource Handbook of Nanoscience and Nanotechnology. Sourced from commons.wikimedia.org.
Constant interaction mode
Also know as “in feedback,” the constant interaction mode uses a feedback loop to alter the distance between the probe and the sample to maintain constant interaction.
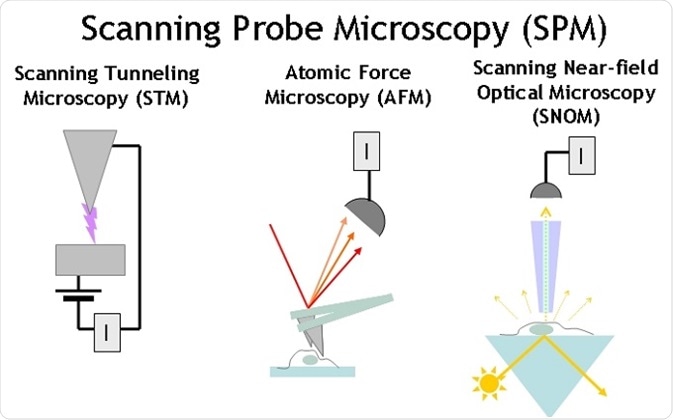
The interaction that is constant depends on the type of scanning probe microscope that is being used. For example, in scanning tunneling microscopy the tunnel current is kept constant whereas in atomic force microscopy the cantilever deflection remains the same.
In constant interaction mode, another image referred to as the error signal or image is created at the same time to depict the heat map of the interactions that influenced the feedback loop. This image should be blank due to constant interaction under perfect setting, although it usually shows some noise with actual use. Nonetheless, this image is useful to alter the feedback gain and reduce the error signal.
Constant height mode
Constant height mode means that the probe is not moved on the vertical axis closer and further away from the sample being analyzed. The z-axis remains fixed, and the interaction value is recorded as a heat map known as a constant height image.
This mode is more difficult to operate than constant interaction mode because it is possible for the probe to hit the sample surface, which will disrupt the image production. In most cases, it is recommended to begin with constant interaction mode to detect the presence of any large contaminants in the region and measure the sample tile and thermal drift, which information can be used for operating in constant height mode.
Choice of technique
The appropriate mode will depend on several factors, including the characteristics of the surface sample and the type of microscope being used.
Contact mode is often the best choice for samples with a hard surface. It should be considered that surface contact might lead to contamination of the probe with loose material that comes from the surface of the sample, particularly softer samples. Therefore, too much pressure in this mode may lead to damage to the probe tip or the sample.
Near-contact mode is less likely to impact the surface of soft sample, but it is more sensitive to variations in moisture and environmental vibrations. On the other hand, non-contact mode is more likely to detect capillary forces from moisture in the air or the liquid film, which may disrupt the image.
References
- https://www.missouribotanicalgarden.org/
- http://physics.oregonstate.edu/~minote/2012-M&A_Prisbrey_7MB.pdf
- http://timstadelmann.de/spmreview.pdf
- https://www.missouribotanicalgarden.org/
- https://www.uba.ar/internacionales/index.php?lang=en
Further Reading
Last Updated: Aug 21, 2023